Cov iav kis tau los ntawm cov kab laug sab yog tsim los ntawm cov kab laug sab thiab lub log kab laug sab, thiab feem ntau cov kab laug sab yog qhov tseem ceeb. Cov iav kab laug sab muaj cov xov sab xis thiab sab laug, uas hu ua cov iav kab laug sab xis thiab sab laug. Cov kab laug sab yog cov iav nrog ib lossis ntau cov hniav helical uas sib txuas nrog lub log kab laug sab los tsim cov iav sib dhos. Qhov chaw indexing tuaj yeem yog cylindrical, conical lossis voj voog, thiab muaj plaub pawg ntawm Archimedes kab laug sab, involute kab laug sab, cov kab laug sab ncaj nraim, thiab tapered enveloping cylindrical kab laug sab.
Cov txiaj ntsig ntawm kev kis kab mob worm gear.
✦ Qhov piv ntawm kev sib kis ib theem yog loj, feem ntau i = 10 ~ 100. Hauv lub tshuab indexing rau kev xa hluav taws xob, qhov siab tshaj plaws tuaj yeem tshaj 1500.
✦ Tib lub meshing yog linear contact, uas tuaj yeem tiv taus lub zog loj.
✦ Cov qauv me me, kev sib kis du, thiab suab nrov tsawg.
✦ Thaum lub kaum sab xis ntawm lub worm tsawg dua li lub kaum sib txhuam sib npaug ntawm cov iav, nws tus kheej xauv nrog counter-stroke, piv txwv li, tsuas yog lub worm tuaj yeem tsav lub log worm, tsis yog lub log worm.
Qhov tsis zoo ntawm cov iav worm drive.
✦Nrog ob lub axes perpendicular, qhov ceev ntawm ob lub log nodes yog perpendicular, yog li qhov ceev ntawm kev swb yog loj, yooj yim rau cua sov thiab hnav.
✦Kev ua haujlwm tsawg, feem ntau yog 0.7 txog 0.8; cov iav kab uas muaj cov iav kab uas xauv nws tus kheej tsis tshua muaj txiaj ntsig, feem ntau tsawg dua 0.5.
Puas yog ib qholub cev muaj zog worm gear stepperpuas yuav tsum muaj kev ua haujlwm xauv tus kheej?
Tsis yog, muaj tej yam yuav tsum tau ua ua ntej. Thaum lub kaum sab xis < lub kaum sab xis sib txhuam, qhovlub cev muaj zog worm gear steppertuaj yeem xauv nws tus kheej.
Feem ntau thaum xaiv lub iav txo stepper lub cev muaj zog, tus neeg siv yuav tsum siv kev tiv thaiv hluav taws xob tsis ua haujlwm lossis lub cev muaj zog nres, yog li lub iav txo lub cev muaj zog yuav raug xaiv nrog lub nres kom ua tiav lub hom phiaj ntawm kev nres, tab sis tsis txhais tau tias nres kiag li, me ntsis inertia tseem nyob ntawd.
Kev xauv tus kheej yog dab tsi?Lub tswv yim ntawm kev xauv tus kheej yog tias txawm tias muaj zog npaum li cas los xij tsis tuaj yeem pib, txawm tias muaj inertia ntau npaum li cas los xij, tsuav yog txoj haujlwm ntawm qhov nquag ua haujlwm kom nres, tag nrho lub tshuab tuaj yeem nres, worm gear geared stepper motor muaj qhov kev ua tau zoo ntawm kev xauv tus kheej no. Tsis muaj kev ua tau zoo ntawm kev xauv tus kheej rau cov geared stepper motors, thiab muaj kev ua tau zoo ntawm kev xauv tus kheej rau cov worm gear reducers nrog qhov sib piv ceev ntawm 1:30 thiab siab dua, thiab qhov loj dua qhov sib piv txo qis, qhov zoo dua ntawm kev xauv tus kheej.
Yuav ua li cas xaiv qhov piv txo kom ntseeg tau tias qhov kev ua haujlwm ntawm tus kheej ntawm cov kab laug sab iav stepper motor?
1、Tus coefficient ntawm kev sib txhuam ntawm cov iav cab yog 0.6, lub kaum sab xis ntawm cov iav cab yog tsawg dua 3°29′11″ uas yog tus kheej xauv, thiab rov ua dua.
2、Tus coefficient ntawm kev sib txhuam ntawm cov iav cab yog 0.7, lub kaum sab xis ntawm cov iav cab yog tsawg dua 4°03′57″ uas yog tus kheej xauv, thiab rov ua dua.
3 、 Thaum tus coefficient sib txhuam ntawm lub log kab yog 0.8, lub kaum sab xis ntawm lub kab yog tsawg dua 4 ° 38′ 39 ″, uas yog, nws tus kheej xauv, thiab rov ua dua.
Thaum lub kaum sab xis ntawm lub worm tsawg dua li lub kaum sib npaug ntawm cov hniav ntawm lub log meshing, lub tshuab txo qis stepper motor muaj qhov xauv tus kheej, uas tuaj yeem ua tiav qhov xauv tus kheej rov qab, uas yog, tsuas yog lub worm tuaj yeem tsav lub log worm, tab sis tsis yog lub log worm tsav lub worm. Feem ntau hauv kev tsim cov tshuab hnyav, cov neeg tsim qauv feem ntau siv lub tshuab iav worm nrog qhov xauv tus kheej, vim tias nws qhov kev xauv tus kheej rov qab tuaj yeem ua lub luag haujlwm tseem ceeb hauv kev tiv thaiv kev nyab xeeb.
Cov mis xam ntawm lub log tsheb kauj vab thiab lub iav tsheb kauj vab.
1. Qhov sib piv ntawm kev sib kis = tus naj npawb ntawm cov hniav iav ÷ tus naj npawb ntawm lub taub hau kab
2, Qhov nrug nruab nrab = (lub suab ntawm lub log kab + lub suab ntawm lub iav kab) ÷ 2
3, Txoj kab uas hla ntawm lub log kab = (tus naj npawb ntawm cov hniav + 2) × modulus
4, Lub suab ntawm lub log kab = module × tus naj npawb ntawm cov hniav
5, Qhov siab ntawm cov kab = qhov dav ntawm cov kab sab nraud - 2 × module
6, Tus kab qhia = π × module × lub taub hau
7, Lub kaum sab xis Helix (lub kaum sab xis qhia) tgB = (modulus × tus lej taub hau) ÷ lub suab kab laug sab
8, Kab laug sab = π × module × taub hau
9, Modulus = txoj kab uas hla ntawm lub voj voog indexing / tus naj npawb ntawm cov hniav
Tus naj npawb ntawm cov taub hau ntawm cov kab laug sab: ib lub taub hau kab laug sab (tsuas muaj ib lub helix ntawm cov kab laug sab, piv txwv li cov kab laug sab tig rau ib lub lim tiam thiab lub log kab laug sab tig los ntawm ib lub hniav); ob lub taub hau kab laug sab (muaj ob lub helix ntawm cov kab laug sab, piv txwv li cov kab laug sab tig rau ib lub lim tiam thiab lub log kab laug sab tig los ntawm ob lub hniav).
Modulus yog qhov loj ntawm lub helix ntawm lub ntsia hlau, piv txwv li qhov loj dua ntawm modulus, qhov loj dua ntawm lub helix ntawm lub ntsia hlau.
Qhov ntsuas txoj kab uas hla yog qhov tuab ntawm lub hau ntswj.
Modulus: Lub voj voog indexing ntawm lub iav yog qhov ntsuas rau kev tsim thiab xam qhov ntev ntawm txhua qhov ntawm lub iav, thiab qhov ncig ntawm lub voj voog indexing iav = πd = zp, yog li ntawd lub cheeb ntawm lub voj voog indexing
d = zp/π
Vim tias π yog tus lej tsis muaj tseeb hauv kab zauv saum toj no, nws tsis yooj yim rau kev tso lub voj voog ntsuas ua qhov siv. Txhawm rau kom yooj yim rau kev suav, tsim khoom thiab kev tshuaj xyuas, qhov piv p / π tam sim no tau teev tseg ua qee qhov txiaj ntsig yooj yim, thiab qhov piv no hu ua modulus (module), qhia ua m.
Hom kab mob gearing
Raws li cov duab sib txawv ntawm cov kab laug sab, cov kab laug sab tuaj yeem muab faib ua cov kab laug sab cylindrical, annular worm drive thiab conical worm drive. Ntawm lawv, cov kab laug sab cylindrical yog qhov siv dav tshaj plaws.
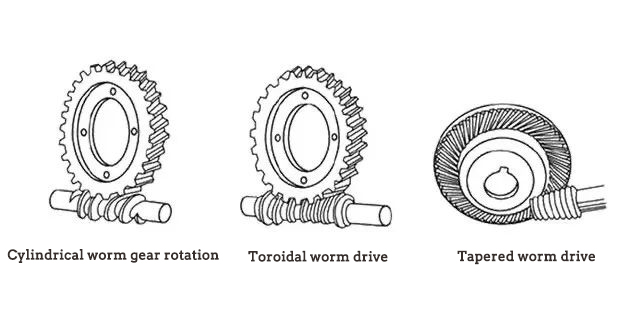
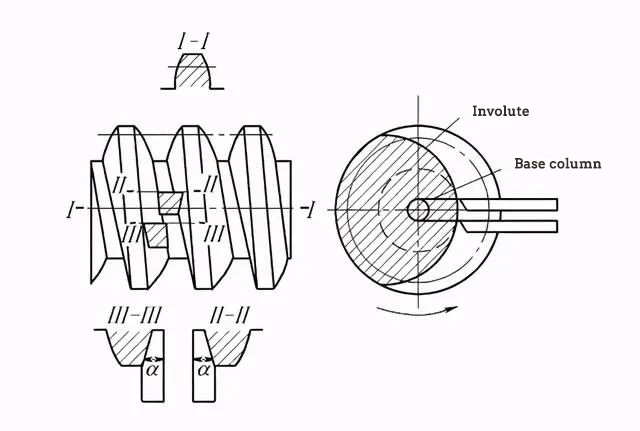
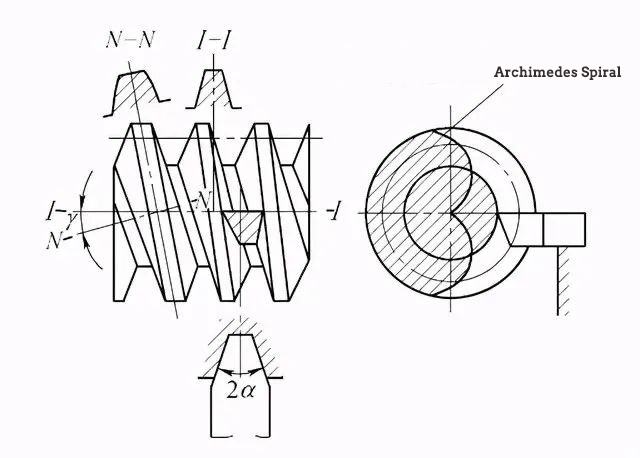
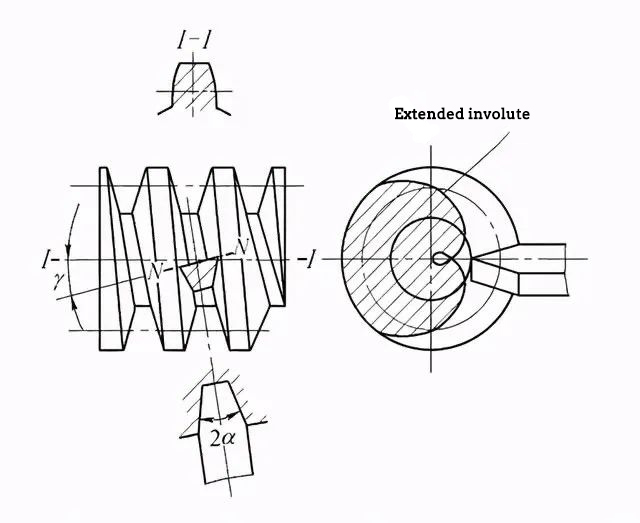
Cov iav kab ntsig cylindrical feem ntau yog txiav rau ntawm lub tshuab dhos nrog lub cuab yeej tig nrog lub hniav ncaj. Nrog rau qhov sib txawv ntawm qhov chaw teeb tsa cuab yeej thiab cov cuab yeej siv, plaub hom iav kab ntsig nrog cov hniav sib txawv hauv seem ntawm txoj kab ntsug tuaj yeem tau txais: cov iav kab ntsig involute (hom ZI), cov iav kab ntsig Archimedes (hom ZA), cov iav kab ntsig ncaj (ZN), thiab cov iav kab ntsig tapered enveloping cylindrical (ZK).
Kab laug sab (hom ZI)- lub dav hlau hniav yog tangent rau lub tog raj kheej lub hauv paus, thiab cov hniav kawg yog involute, haum rau kev ceev dua thiab lub zog loj dua.
Kab mob Archimedean (hom ZA)- Cov hniav profile perpendicular rau lub dav hlau axis yog Archimedean ntsia hlau, thiab cov hniav profile hauv lub dav hlau dhau los ntawm lub axis yog ncaj, yooj yim ua thiab tsis muaj qhov tseeb. (Axial ncaj profile worm iav).
Cov kab ncaj nraim (ZN)- siv tau los sib tsoo cov hniav nrog lub log sib tsoo hloov kho, kev ua tiav yooj yim, feem ntau siv rau ntau lub taub hau kab, kev sib kis tau zoo txog li 0.9.
Pom tias koj nkag siab luv luv txog qhov kev xa xovlub hauv paus ntsiab lus ntawmcov cav iav cab, yog tias muaj lwm yam koj xav sib txuas lus, thovtiv tauj peb!
Peb sib tham nrog peb cov neeg siv khoom, mloog lawv cov kev xav tau thiab ua raws li lawv cov lus thov. Peb ntseeg tias lub hauv paus ntawm kev koom tes zoo thiab yeej yog qhov zoo ntawm cov khoom thiab kev pabcuam rau cov neeg siv khoom.
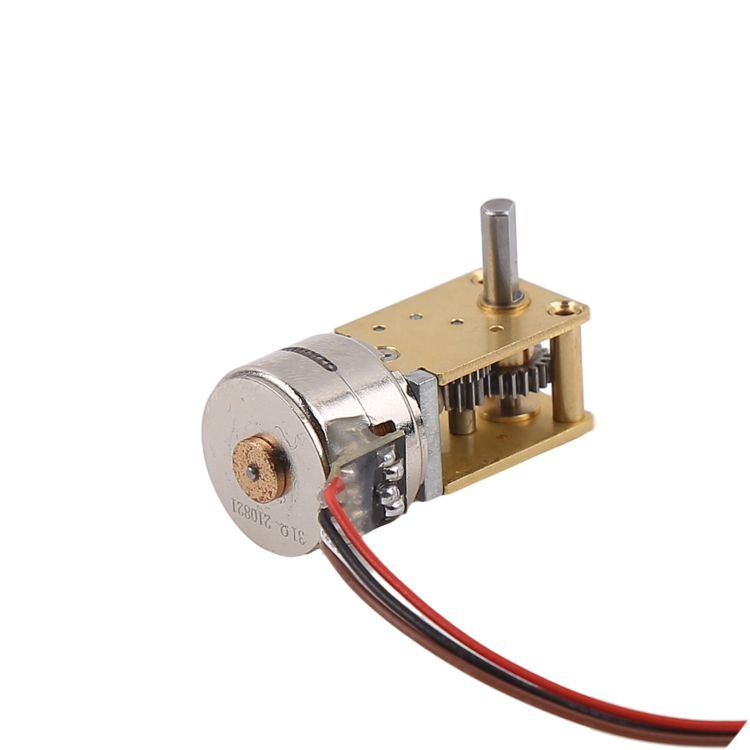
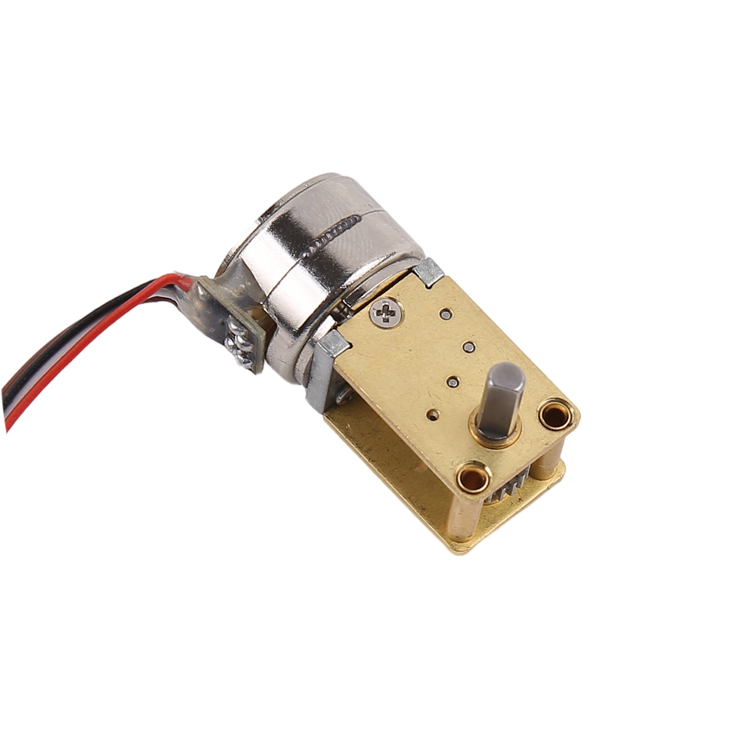
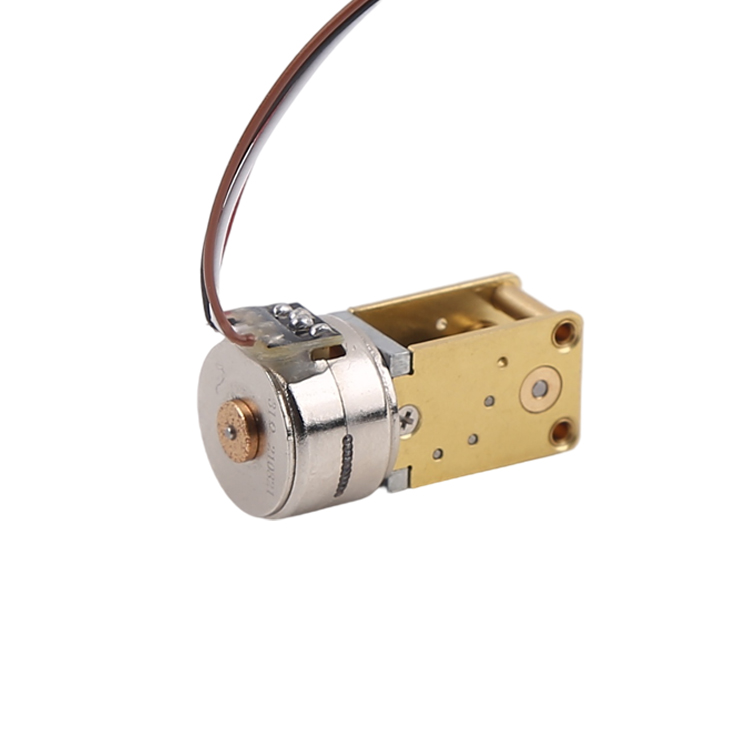
Changzhou Vic-tech Motor Technology Co., Ltd. yog ib lub koom haum tshawb fawb thiab tsim khoom uas tsom mus rau kev tshawb fawb thiab kev txhim kho lub cev muaj zog, kev daws teeb meem dav dav rau kev siv lub cev muaj zog, thiab kev ua thiab tsim cov khoom siv lub cev muaj zog. Ltd. tau tshwj xeeb hauv kev tsim cov micro motors thiab cov khoom siv txij li xyoo 2011. Peb cov khoom tseem ceeb: miniature stepper motors, gear motors, geared motors, underwater thrusters thiab motor drivers thiab controllers.

Peb pab neeg muaj ntau tshaj 20 xyoo ntawm kev paub txog kev tsim, kev tsim kho thiab kev tsim cov micro-motors, thiab tuaj yeem tsim cov khoom thiab pab cov neeg siv khoom tsim raws li cov kev xav tau tshwj xeeb! Tam sim no, peb feem ntau muag rau cov neeg siv khoom hauv ntau pua lub tebchaws hauv Asia, North America thiab Europe, xws li Tebchaws Meskas, UK, Kauslim Teb, Lub Tebchaws Yelemees, Canada, Spain, thiab lwm yam. Peb lub tswv yim ua lag luam "kev ncaj ncees thiab kev ntseeg siab, kev ua haujlwm zoo", "cov neeg siv khoom ua ntej" tus nqi tus qauv txhawb nqa kev ua tau zoo-taw qhia kev tsim kho tshiab, kev koom tes, lub siab zoo ntawm kev lag luam, los tsim kom muaj "kev tsim thiab sib koom" Lub hom phiaj kawg yog los tsim kom muaj txiaj ntsig zoo tshaj plaws rau peb cov neeg siv khoom.
Lub sijhawm tshaj tawm: Lub Ib Hlis-30-2023