Tom qab lublub cev muaj zog stepperpib yuav muaj kev txwv ntawm kev tig ntawm lub luag haujlwm ntawm qhov tam sim no ua haujlwm, zoo li lub elevator hovering hauv nruab nrab-cua xeev, nws yog qhov tam sim no, yuav ua rau lub cev muaj zog kom sov, qhov no yog ib qho xwm txheej ib txwm muaj.
Vim li cas ib.
Ib qho ntawm cov txiaj ntsig tseem ceeb tshaj plaws ntawmcov cav stepperyog qhov kev tswj hwm meej uas tuaj yeem ua tiav hauv lub kaw lus qhib-loop. Kev tswj hwm qhib-loop txhais tau tias tsis tas yuav muaj cov ntaub ntawv tawm tswv yim txog qhov chaw (rotor).
Qhov kev tswj hwm no zam kev siv cov khoom siv kim thiab cov khoom siv tawm tswv yim zoo li cov encoders kho qhov muag, vim tias tsuas yog cov stepper pulses nkag mus yuav tsum tau taug qab kom paub qhov chaw ntawm (rotor). Tsis ntev los no, qee tus neeg siv khoom tau xav txog peb cov kws ua haujlwm Shangshe lub cev muaj zog tias stepper motors kuj muaj teeb meem kub, yog li yuav daws qhov teeb meem no li cas?
1, txolub cev muaj zog steppercua sov, txo cua sov yog kom txo qhov poob tooj liab thiab hlau poob. Txo qhov poob tooj liab hauv ob qho kev taw qhia, txo qhov hluav taws xob yin thiab tam sim no, uas yuav tsum tau xaiv qhov tsis kam me me thiab qhov tam sim no ntsuas me me li sai tau thaum lub cev muaj zog, ob-theem stepper motor, tuaj yeem siv rau hauv series motor tsis yog parallel motor, tab sis qhov no feem ntau tsis sib haum nrog qhov yuav tsum tau ua ntawm torque thiab kev kub ceev.
2, rau lub cev muaj zog tau raug xaiv, yuav tsum siv tag nrho cov kev tswj hwm ib nrab tam sim no ntawm tus tsav tsheb thiab kev ua haujlwm offline, tus qub yuav txo qhov tam sim no thaum lub cev muaj zog so, qhov tom kawg tsuas yog txiav tawm qhov tam sim no.
3, ntxiv rau, kev faib ua pawg stepper tsav tsheb vim tias tam sim no waveform ze rau sinusoidal, tsawg dua harmonics, lub cev muaj zog cua sov yuav tsawg dua. Muaj ob peb txoj hauv kev los txo cov hlau poob, qib voltage yog cuam tshuam nrog nws, lub cev muaj zog siab tsav tsheb txawm hais tias nws yuav coj kev nce hauv cov yam ntxwv ceev ceev, tab sis kuj coj kev nce hauv kev tsim cua sov.
4, yuav tsum xaiv qhov tsim nyog tsav lub cev muaj zog voltage theem, coj mus rau hauv tus account lub siab band, smoothness thiab cua sov, suab nrov thiab lwm yam qhia.
Vim li cas ob.
Txawm hais tias qhov kub ntawm lub cev muaj zog stepper feem ntau tsis cuam tshuam rau lub neej ntawm lub cev muaj zog, rau feem ntau cov neeg siv khoom tsis tas yuav them sai sai rau. Tab sis qhov tseeb yuav coj qee qhov tsis zoo. Xws li cov coefficient thermal expansion sab hauv ntawm txhua qhov ntawm cov kev hloov pauv ntawm cov qauv sib txawv thiab cov kev hloov pauv me me hauv qhov sib txawv ntawm huab cua sab hauv, yuav cuam tshuam rau qhov kev teb dynamic ntawm lub cev muaj zog stepper, kev kub ceev yuav yooj yim poob kauj ruam. Lwm qhov piv txwv yog tias qee lub sijhawm tsis pub tso cai rau kev tsim cua sov ntau dhau ntawm cov cev muaj zog stepper, xws li cov khoom siv kho mob thiab cov khoom siv kuaj siab. Yog li ntawd, qhov kub ntawm lub cev muaj zog stepper yuav tsum tau tswj. Qhov kub ntawm lub cev muaj zog yog tshwm sim los ntawm cov yam no.
1, qhov tam sim no teeb tsa los ntawm tus tsav tsheb yog loj dua li qhov ntsuas tam sim no ntawm lub cev muaj zog
2, qhov ceev ntawm lub cev muaj zog yog ceev dhau
3, lub cev muaj zog nws tus kheej muaj qhov inertia loj thiab qhov chaw torque, yog li txawm tias qhov kev ua haujlwm ceev nruab nrab yuav kub, tab sis tsis cuam tshuam rau lub neej ntawm lub cev muaj zog. Lub ntsiab lus demagnetization ntawm lub cev muaj zog hauv 130-200 ℃, yog li lub cev muaj zog hauv 70-90 ℃ yog qhov xwm txheej ib txwm muaj, tsuav yog tsawg dua 130 ℃ feem ntau tsis muaj teeb meem, yog tias koj xav tias overheated, lub zog tsav tam sim no yog teeb tsa rau kwv yees li 70% ntawm lub cev muaj zog tam sim no lossis lub cev muaj zog ceev kom txo qee qhov.
Vim li cas peb.
Stepper motor ua ib qho khoom siv digital actuating, tau siv dav hauv kev tswj kev txav mus los. Ntau tus neeg siv thiab cov phooj ywg hauv kev siv stepper motors, xav tias lub cev muaj zog ua haujlwm nrog lub cua sov loj, muaj kev tsis ntseeg, tsis paub tias qhov xwm txheej no puas yog qhov ib txwm muaj. Qhov tseeb, cua sov yog ib qho xwm txheej tshwm sim ntawm stepper motors, tab sis qib cua sov twg suav tias yog qhov ib txwm muaj, thiab yuav ua li cas kom txo qis cua sov ntawm stepper motor?
Cov hauv qab no peb ua qee qhov kev faib tawm yooj yim, vam tias nyob rau hauv qhov tseeb ua haujlwm ntawm kev siv tswv yim:.
1 lub hauv paus ntsiab lus ntawm lub cev muaj zog cua sov
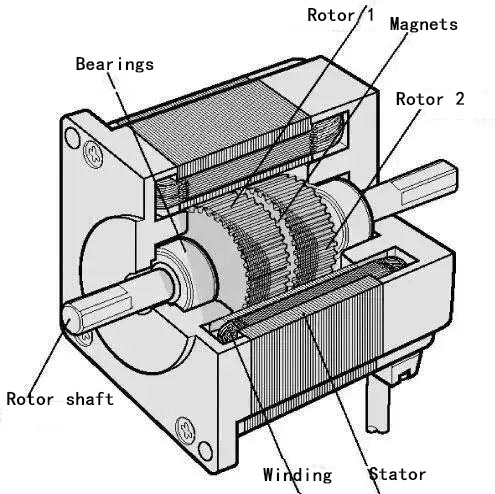
Feem ntau peb pom txhua yam motors, lub hauv paus sab hauv thiab lub kauj winding. Lub winding muaj kev tiv thaiv, lub zog yuav tsim kev poob, qhov loj ntawm kev poob thiab kev tiv thaiv thiab tam sim no squared proportional rau kev poob, uas feem ntau hu ua tooj liab poob, yog tias tam sim no tsis yog tus qauv DC lossis sine wave, tab sis kuj harmonic poob; lub hauv paus muaj hysteresis eddy tam sim no nyhuv, hauv lub teb magnetic alternating kuj yuav tsim kev poob, qhov loj ntawm cov khoom, tam sim no, zaus, voltage, uas yog hu ua hlau poob. Tooj liab poob thiab hlau poob yuav pom tseeb hauv daim ntawv ntawm cua sov, yog li cuam tshuam rau kev ua haujlwm ntawm lub cev muaj zog. Stepper motors feem ntau nrhiav kev raug qhov chaw thiab torque tso zis, qhov ua haujlwm yog qis, tam sim no feem ntau loj, thiab cov khoom harmonic siab, qhov zaus ntawm tam sim no alternation kuj sib txawv nrog qhov ceev, thiab yog li stepper motors feem ntau muaj cua sov, thiab qhov xwm txheej yog qhov loj dua li AC motor dav dav.
2 stepper lub cev muaj zog cua sov tsim nyog ntau yam
Qhov uas lub cev muaj zog cua sov tsim tau nyob ntawm seb lub cev muaj zog sab hauv tsev puas muaj zog npaum li cas. Lub rwb thaiv tsev sab hauv tsev tsuas yog raug rhuav tshem thaum kub siab (saum toj no 130 degrees). Yog li ntawd, tsuav yog sab hauv tsev tsis tshaj 130 degrees, lub cev muaj zog yuav tsis ua rau lub nplhaib puas tsuaj, thiab qhov kub ntawm qhov chaw yuav qis dua 90 degrees ntawm qhov ntawd. Yog li ntawd, qhov kub ntawm qhov chaw ntawm lub cev muaj zog stepper hauv 70-80 degrees yog qhov ib txwm muaj. Txoj kev ntsuas kub yooj yim muaj txiaj ntsig zoo rau qhov ntsuas kub, koj tuaj yeem txiav txim siab kwv yees li: nrog tes tuaj yeem kov ntau dua 1-2 vib nas this, tsis pub ntau tshaj 60 degrees; nrog tes tsuas yog kov, txog li 70-80 degrees; ob peb tee dej sai sai vaporized, nws yog ntau tshaj 90 degrees
3 stepper lub cev muaj zog cua sov nrog kev hloov pauv ceev
Thaum siv cov thev naus laus zis tsav tsheb tas mus li, lub cev muaj zog stepper ntawm qhov ceev tsis hloov pauv thiab qeeb, qhov tam sim no yuav nyob ruaj khov kom tswj tau qhov tso zis torque tas mus li. Thaum qhov ceev siab txog qee qib, lub cev muaj zog sab hauv lub zog nce siab, qhov tam sim no yuav maj mam poob qis, thiab lub zog torque kuj yuav poob qis. Yog li ntawd, qhov xwm txheej cua sov vim yog qhov poob tooj liab yuav nyob ntawm qhov ceev. Qhov ceev tsis hloov pauv thiab qeeb feem ntau tsim cov cua sov siab, thaum qhov ceev ceev tsim cov cua sov qis. Tab sis qhov poob hlau (txawm hais tias muaj feem me me) kev hloov pauv tsis zoo ib yam, thiab tag nrho lub cev muaj zog cua sov yog qhov sib sau ua ke ntawm ob qho, yog li qhov saum toj no tsuas yog qhov xwm txheej dav dav xwb.
4 cua sov los ntawm kev cuam tshuam
Txawm hais tias lub cev muaj zog cua sov feem ntau tsis cuam tshuam rau lub neej ntawm lub cev muaj zog, feem ntau ntawm cov neeg siv khoom tsis tas yuav them sai sai rau qhov no. Tab sis qhov tseeb yuav coj qee qhov kev cuam tshuam tsis zoo. Xws li cov coefficients sib txawv ntawm kev nthuav dav thermal ntawm cov khoom sab hauv ntawm lub cev muaj zog ua rau muaj kev hloov pauv ntawm kev ntxhov siab ntawm cov qauv thiab kev hloov pauv me me hauv qhov sib txawv ntawm huab cua sab hauv, yuav cuam tshuam rau kev teb ntawm lub cev muaj zog, kev kub ceev yuav yooj yim poob qis. Lwm qhov piv txwv yog tias qee lub sijhawm tsis pub lub cev muaj zog cua sov ntau dhau, xws li cov khoom siv kho mob thiab cov khoom siv kuaj mob siab. Yog li ntawd, kev tsim cua sov ntawm lub cev muaj zog yuav tsum tau tswj hwm raws li qhov tsim nyog.
5 Yuav ua li cas kom txo qhov kub ntawm lub cev muaj zog
Txo qhov kub tsim, yog kom txo qhov poob tooj liab thiab hlau poob. Txo qhov poob tooj liab hauv ob qho kev taw qhia, txo qhov tsis kam thiab tam sim no, uas yuav tsum tau xaiv qhov tsis kam me me thiab tam sim no ntsuas me me li sai tau thaum lub cev muaj zog, lub cev muaj zog ob theem, tuaj yeem siv lub cev muaj zog hauv series yam tsis muaj lub cev muaj zog sib luag. Tab sis qhov no feem ntau tsis sib haum nrog qhov yuav tsum tau ua ntawm torque thiab kev kub ceev. Rau lub cev muaj zog xaiv, lub zog tsav lub luag haujlwm tswj hwm ib nrab tam sim no thiab kev ua haujlwm offline yuav tsum tau siv tag nrho, tus thawj coj txiav qhov tam sim no thaum lub cev muaj zog so, thiab qhov kawg tsuas yog txiav qhov tam sim no. Tsis tas li ntawd, lub subdivision tsav, vim tias qhov tam sim no waveform ze rau sinusoidal, tsawg dua harmonics, lub cev muaj zog cua sov kuj yuav tsawg dua. Muaj ob peb txoj hauv kev los txo qhov poob hlau, thiab qib voltage cuam tshuam nrog nws. Txawm hais tias lub cev muaj zog tsav los ntawm qhov hluav taws xob siab yuav coj kev nce ntxiv hauv cov yam ntxwv ceev ceev, nws kuj coj kev nce ntxiv hauv kev tsim cua sov. Yog li yuav tsum xaiv qib voltage tsav tsim nyog, coj mus rau hauv tus account qhov ceev ceev, du thiab kub, suab nrov thiab lwm yam cim.
Rau txhua hom stepper motors, sab hauv yog tsim los ntawm ib lub hlau core thiab ib lub winding coil. Lub winding muaj kev tiv thaiv, energized yuav tsim kev poob, qhov loj ntawm kev poob yog proportional rau lub square ntawm kev tiv thaiv thiab tam sim no, uas feem ntau hu ua tooj liab meteor, yog tias tam sim no tsis yog tus qauv DC lossis sine wave, tab sis kuj harmonic poob; core muaj hysteresis eddy tam sim no nyhuv, nyob rau hauv lub alternating magnetic teb kuj yuav tsim kev poob, qhov loj ntawm cov khoom, tam sim no, zaus, voltage, uas yog hu ua hlau poob. Tooj liab poob thiab hlau poob yuav pom nyob rau hauv daim ntawv ntawm cua sov, yog li cuam tshuam rau kev ua haujlwm ntawm lub cev muaj zog. Stepper motors feem ntau nrhiav kev raug qhov chaw thiab torque tso zis, qhov ua haujlwm yog qis, tam sim no feem ntau loj, thiab cov khoom harmonic siab, qhov zaus ntawm tam sim no alternation kuj sib txawv nrog qhov ceev, thiab yog li stepper motors feem ntau muaj cua sov, thiab qhov xwm txheej yog qhov loj dua li AC motor dav dav.
Lub sijhawm tshaj tawm: Kaum Ib Hlis-16-2022