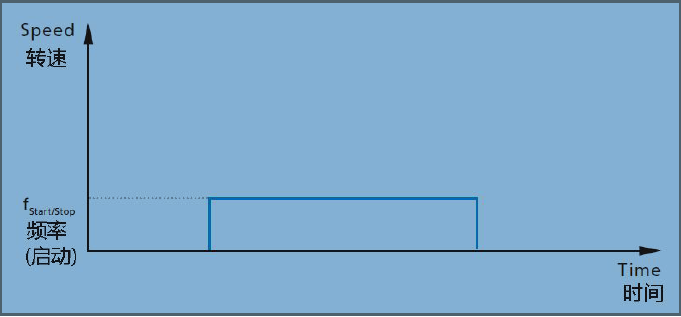
①Nyob ntawm hom kev txav mus los, qhov kev tshuaj xyuas txawv. Kev pib-Nres ua haujlwm: Hauv hom kev ua haujlwm no, lub cev muaj zog txuas nrog lub nra thiab ua haujlwm ntawm qhov ceev tas li. Lub cev muaj zog yuav tsum ua kom lub nra nrawm dua (dhau qhov inertia thiab kev sib txhuam) hauv thawj kauj ruam mus rau qhov zaus hais kom ua.
Hom kev ua tsis tiav:Lub cev muaj zog steppertsis pib
| Vim li cas | Cov Kev Daws Teeb Meem |
| Kev thauj khoom siab dhau lawm | Lub cev muaj zog tsis yog lawm, xaiv lub cev muaj zog loj dua |
| Zaus siab dhau lawm | Txo qhov ntau zaus |
| Yog tias lub cev muaj zog oscillates los ntawm sab laug mus rau sab xis, ib theem yuav tawg lossis tsis txuas nrog | Hloov lossis kho lub cev muaj zog |
| Theem tam sim no tsis tsim nyog | Ua kom cov theem tam sim no nce ntxiv, tsawg kawg yog thaum thawj zaug ob peb kauj ruam. |
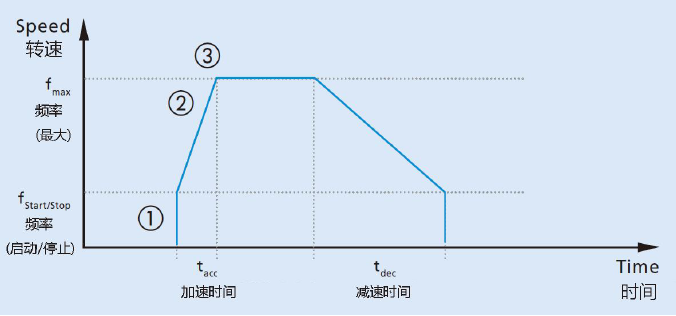
②Hom kev nrawm: Hauv qhov no,Lub cev muaj zog stepperraug tso cai kom nrawm mus rau qhov zaus siab tshaj plaws nrog rau qhov nrawm nrawm uas tau teeb tsa ua ntej hauv tus tsav tsheb.
Hom kev ua tsis tiav: Stepper motor tsis pib
Vim yog vim li cas thiabcov kev daws teeb meemsaib ntu ① "Kev ua haujlwm pib-nres".
Hom kev ua tsis tiav: Stepper motor tsis ua tiav qhov kev nce qib.
| Vim li cas | Cov Kev Daws Teeb Meem |
| Lub cev muaj zog raug kaw hauv qhov zaus resonance | ● Ua kom nrawm dua kom dhau qhov resonancezaus sai sai●Xaiv qhov zaus pib-nres saum qhov resonance point●Siv ib nrab kauj ruam lossis me me kauj ruam● Ntxiv ib lub tshuab damper uas tuaj yeem ua daim ntawv ntawm ib qhoinert disk ntawm lub rear shaft |
| Qhov hluav taws xob tsis raug lossis qhov teeb tsa tam sim no (qis dhau) | ● Ua kom lub zog hluav taws xob lossis tam sim no nce ntxiv (nws raug tso cai teeb tsa tus nqi siab duarau ib lub sijhawm luv luv)●Sim lub cev muaj zog qis dua●Siv lub tshuab hluav taws xob tas mus li (yog tias siv lub tshuab hluav taws xob tas mus li) |
| Qhov ceev tshaj plaws siab dhau lawm | ● Txo qhov ceev tshaj plaws● Txo qhov nce ntawm kev nrawm |
| Qhov tsis zoo ntawm lub acceleration ramp los ntawm lub cavcov khoom siv hluav taws xob (tshwm sim nrog cov ntaiv digital) | ●Sim nrog lwm tus tsav tsheb |
Hom kev ua tsis tiav: Stepper motor ua tiav qhov kev nrawm tab sis nres thaum qhov ceev tas li.
| Vim li cas | Cov Kev Daws Teeb Meem |
| Lub cev muaj zog Stepper ua haujlwm ntawm qhov txwv ntawm nws qhov kev ua haujlwm kev muaj peev xwm thiab kev nres vim yog kev nrawm nrawm dhau. Qhov chaw sib npaug yog overshooted, ua rau rotor vibrations thiab instability. | ● Xaiv qhov nrawm dua lossis siv ob qho sib txawvcov theem kev nrawm, siab thaum pib, qis dua mus rau qhov ceev tshaj plaws● Ua kom lub zog loj dua● Ntxiv ib lub tshuab damper rau ntawm lub qag nram qab. Nco ntsoov tiasqhov no yuav ntxiv rotor's inertia thiab tej zaum yuav tsis daws qhov teeb meemyog tias qhov ceev tshaj plaws yog nyob rau ntawm qhov txwv ntawm lub cev muaj zog. ● Tsav lub cev muaj zog siv micro-stepping |
③Kev nce ntxiv ntawm cov nyiaj them raws sijhawm
Muaj tej lub sij hawm, lub cev muaj zog khiav li qub rau lub sij hawm ntev tab sis poob cov kauj ruam tom qab ib ntus. Hauv qhov xwm txheej ntawd, nws yuav zoo li lub nra hnyav uas lub cev muaj zog pom tau hloov pauv. Nws tuaj yeem los ntawm kev hnav ntawm cov kabmob ntawm lub cev muaj zog lossis los ntawm qhov xwm txheej sab nraud.
Cov Kev Daws Teeb Meem:
● Xyuas kom tseeb tias muaj ib qho xwm txheej sab nraud: Puas tau hloov lub tshuab uas lub cev muaj zog tsav?
● Xyuas kom tseeb tias lub bearing puas lawm: Siv cov ball bearings es tsis txhob siv sintered sleeve bearing kom lub cev muaj zog siv tau ntev dua.
● Xyuas seb qhov kub thiab txias puas tau hloov pauv. Nws qhov cuam tshuam rau qhov viscosity ntawm cov roj nplua nyeem rau cov bearing tsis yog qhov tsis tseem ceeb rau cov micro motors. Siv cov roj nplua nyeem uas haum rau qhov ntau thiab tsawg ua haujlwm. (Piv txwv li: cov roj nplua nyeem yuav ua viscous thaum kub heev, lossis tom qab siv ntev, uas yuav ua rau lub nra hnyav ntxiv)
Lub sijhawm tshaj tawm: Kaum Ib Hlis-16-2022