Nrog rau kev noj qab haus huv rau pej xeem thiab kev nyab xeeb yog qhov tseem ceeb tshaj plaws hauv peb lub neej niaj hnub, qhov rooj xauv qhov rooj tsis siv neeg tau dhau los ua neeg nyiam, thiab cov xauv no yuav tsum muaj kev tswj xyuas kom zoo. Miniature precisionstepper motorsyog cov kev daws teeb meem zoo tshaj plaws rau qhov compact, sophisticated tsim. Tsis siv neegqhov rooj xauvtau nyob ib puag ncig rau qee lub sijhawm, pib ua lag luam hauv cov chaw ntiav pw thiab chaw ua haujlwm. Nrog rau qhov nce ntawm cov neeg siv smartphone thiab kev sib kis ntawm cov cuab yeej ntse hauv tsev, thaj chaw tsis siv neegqhov rooj xauv daim ntawv thovkuj tau txais koob meej. Muaj kev sib txawv ntawm kev lag luam thiab cov neeg siv hauv tsev, xws li kev siv roj teeb piv rau hluav taws xob sib txuas thiab RFID piv rau Bluetooth technology.

Cov tsoos latch yuav tsum tau muab tso rau hauv lub xauv lub tog raj kheej kom xauv / xauv nws los ntawm kev tig nws manually, qhov zoo ntawm txoj kev no yog tias nws muaj kev nyab xeeb heev. Cov neeg tuaj yeem ua yuam kev lossis poob cov yuam sij, thiab cov txheej txheem hloov cov xauv / cov yuam sij yuav tsum tau siv cov cuab yeej thiab kev txawj ntse. Cov xauv hluav taws xob tau hloov pauv ntau dua hauv kev nkag siab ntawm kev tswj xyuas thiab feem ntau tuaj yeem hloov kho tau yooj yim thiab hloov kho los ntawm software. Ntau lub ntsuas hluav taws xob muab ob qho tib si phau ntawv thiab kev ntsuas hluav taws xob tswj kev xaiv, muab kev daws teeb meem zoo dua.
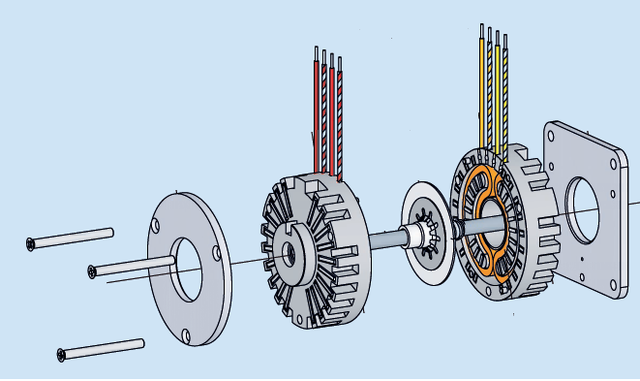
Me txoj kab uas hla stepper motors rau compact electronic locks yog zoo tagnrho rau cov kev daws teeb meem nrog loj txwv thiab meej qhov chaw. Lub cev muaj zog engineering thiab cov cuab yeej siv hluav taws xob tsim hluav taws xob tau tsav txoj kev loj hlob ntawm stepper motors nrog txoj kab uas me tshaj tam sim no muaj (3.4 hli OD). Advanced magnetic and structural analysis techniques are using to optimize the design and materials for the limited space available. Ib qho kev txiav txim siab tseem ceeb tshaj plaws rau cov me me stepper motors yog cov kauj ruam ntev ntawm lub cev muaj zog, uas nyob ntawm qhov kev daws teeb meem tshwj xeeb. Feem ntau cov kauj ruam ntev yog 7.5 degrees thiab 3.6 degrees, uas sib haum mus rau 48 thiab 100 cov kauj ruam ib kiv puag ncig, feem, nrog stepper motors muaj lub kaum sab xis ntawm 18 degrees. Nrog rau tag nrho cov kauj ruam (2-2 theem excitation) tsav, lub cev muaj zog rotates 20 kauj ruam ib kiv puag ncig thiab cov suab nrov ntawm cov ntsia hlau yog 0.4 hli, yog li txoj hauj lwm tswj qhov tseeb ntawm 0.02 hli tuaj yeem ua tiav.

Stepper motors tuaj yeem muaj lub iav reducer, uas muab lub kaum sab xis me dua, thiab cov iav txo qis uas ua rau kom muaj lub zog muaj zog. Rau cov lus tsa suab, stepper motors txuas nrog cov ntsia hlau ntawm lub txiv ntoo (cov motors no tseem hu ua linear actuators). Yog tias lub ntsuas hluav taws xob siv lub iav reducer, cov ntsia hlau tuaj yeem txav tau nrog qhov tseeb txawm tias muaj txoj kab nqes loj.
Cov tswv yim ntawm lub tshuab hluav taws xob stepper lub cev muaj zog tuaj yeem ua tau ntau yam, xws li FPC connectors, connector terminals tuaj yeem ncaj qha mus rau PCB, lub laub pas nrig ntawm cov khoom tso tawm tuaj yeem yog cov yas slider lossis hlau slider, thiab qee qhov kev cai sliders raws li kev mus ncig ntawm lub xauv. Vim lub me me stepper lub cev muaj zog thiab nyias screws, cov txheej txheem xov ntev yog txwv thiab qhov siab tshaj plaws mus los ntawm lub xauv yog feem ntau tsawg dua 50 mm. Feem ntau, stepper lub cev muaj zog muaj zog ntawm 150 mus rau 300 g. Lub zog thrust sib txawv nyob ntawm qhov tsav voltage, lub cev muaj zog, thiab lwm yam.
Xaus
Nrog rau cov neeg siv khoom txaus siab rau cov khoom lag luam qis thiab tsis muaj kev cuam tshuam, me me stepper motors tuaj yeem ua raws li qhov loj me me. Ntxiv nrog rau daim ntawv cog lus, stepper motors yooj yim rau kev tswj, tshwj xeeb tshaj yog rau qhov tseeb qhov chaw thiab tsis tshua muaj zog torque yuav tsum zoo li nws pib-lock. Txhawm rau ua tiav qhov ua haujlwm zoo ib yam, lwm lub tshuab thev naus laus zis xav tau qhov sib ntxiv ntawm Hall-effect sensors lossis txoj haujlwm txoj haujlwm tawm tswv yim tswj cov txheej txheem. Stepper motors tuaj yeem tsav nrog cov microcontrollers yooj yim, uas tuaj yeem txo cov neeg tsim qauv ntawm kev txhawj xeeb ntawm kev daws teeb meem ntau dhau.
Post lub sij hawm: Nov-25-2022