
Daim ntawv thov ntawm8 hli me me slider stepper motorshauv cov tshuab kuaj ntshav yog ib qho teeb meem nyuaj uas muaj xws li engineering, biomedicine thiab precision mechanics. Hauv cov neeg kuaj ntshav, cov me me slider stepper motors feem ntau yog siv los tsav cov neeg kho tshuab precision los ua ntau yam ntawm cov ntshav tsom xam cov haujlwm. Cov hauv qab no yog cov lus piav qhia ntxaws txog nws txoj haujlwm ua haujlwm thiab daim ntawv thov:
I. Txoj Cai Ua Haujlwm
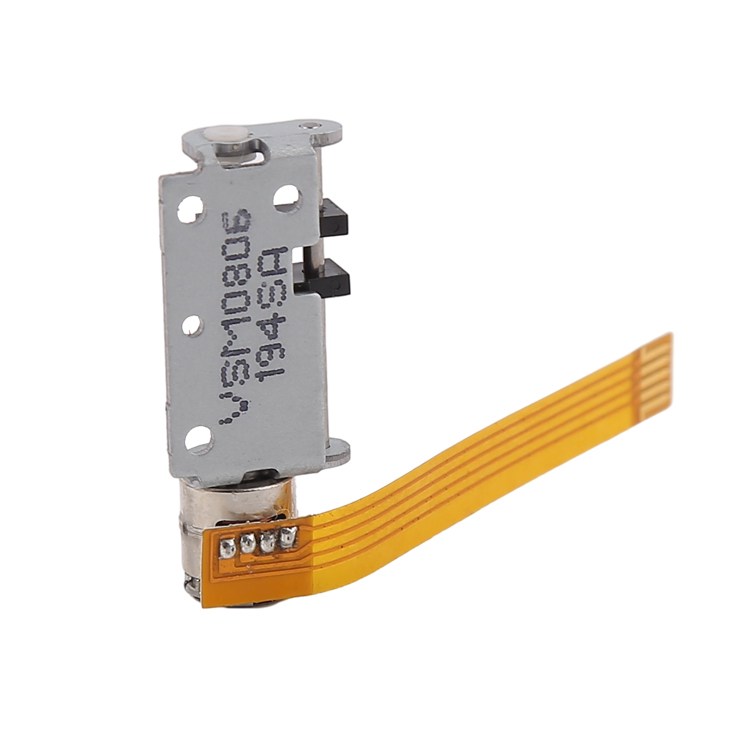
Cov8 hli me me slider stepper lub cev muaj zogyog ib hom tshwj xeeb ntawm lub cev muaj zog uas nws txoj haujlwm ua haujlwm feem ntau yog raws li txoj cai ntawm electromagnetic induction thiab kev cuam tshuam ntawm cov hlau nplaum ntawm qhov tam sim no. Tshwj xeeb, me me slider stepper lub cev muaj zog muaj lub stator thiab lub rotor txav tau. Lub stator feem ntau muaj ntau yam excitation coils, thaum lub rotor muaj ib lossis ntau cov hlau nplaum ruaj khov. Los ntawm kev thov tam sim no rau cov coils excitation nyob rau hauv ib ntus, ib qho chaw sib nqus tuaj yeem tsim tawm uas cuam tshuam nrog cov hlau nplaum ntawm lub rotor cov hlau nplaum ruaj khov los tsav lub rotor.
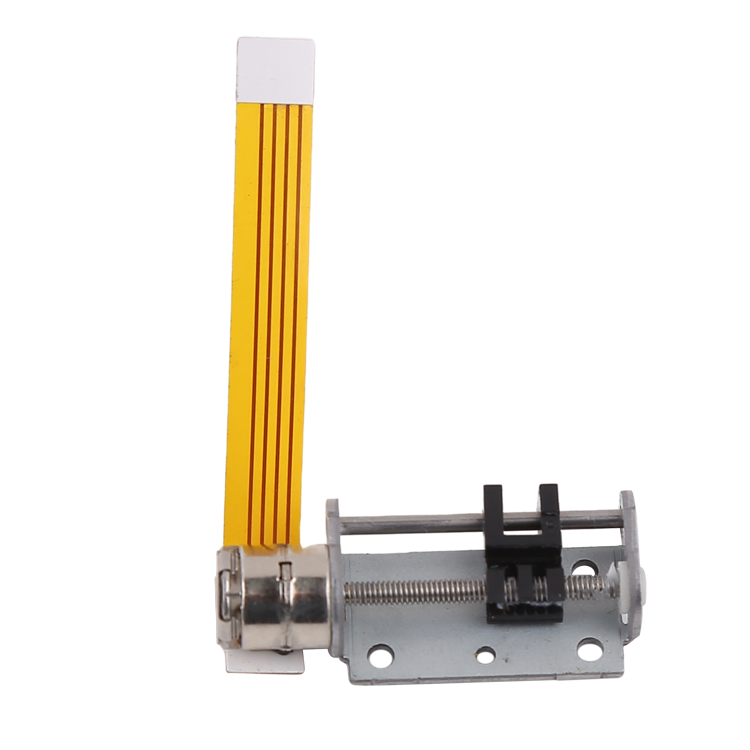
Hauv kev ntsuas ntshav, tus stator ntawm tusminiature slider stepper lub cev muaj zogfeem ntau yog tsau rau lub thav duab ntawm lub ntsuas, thaum lub rotor txuas nrog ib tug slider uas swb ntawm ib txoj kev tsheb ciav hlau. Thaum lub stepper lub cev muaj zog tau txais cov lus txib los ntawm kev tswj qhov system, nws yuav tig mus rau hauv ib kauj ruam tshwj xeeb thiab hloov cov kev sib hloov mus rau hauv cov lus tsa suab los ntawm cov slider, yog li tsav cov khoom siv hluav taws xob txuas nrog lub slider (xws li, cov koob txhaj tshuaj, cov qauv ua qauv, thiab lwm yam) kom ua tiav cov kev hloov pauv.
II. Daim ntawv thov
Nyob rau hauv cov ntshav kuaj ntsuas, daim ntawv thov ntawm8 hli me me slider stepper motor feem ntau yog tshwm sim hauv cov hauv qab no:
Kev coj ua piv txwv: lub tshuab tshuab uas tau tsav los ntawm stepper motors tso cai rau kev thov kom meej, sib tov thiab hloov cov ntshav kuaj. Piv txwv li, thaum kuaj ntshav lossis kuaj ntshav tshwj xeeb yuav tsum tau ua, lub tshuab stepper tuaj yeem tsav lub caj npab robotic txav cov qauv ntawm qhov chaw cia mus rau qhov chaw kuaj lossis ntxhua khaub ncaws.

Reagent Ntxiv: Thaum ua cov tshuaj ntsuam ntshav, feem ntau yuav tsum tau ntxiv cov reagents tshwj xeeb los txhawb cov tshuaj tiv thaiv tshuaj lossis hloov pH ntawm cov qauv. Lub tshuab hluav taws xob uas tau tsav los ntawm stepper motors raug ntsuas thiab ntxiv cov reagents los xyuas kom meej cov txiaj ntsig kev soj ntsuam.
Kev tswj qhov kub thiab txias: Qee qhov kev kuaj ntshav yuav tsum tswj kom nruj, xws li cov tshuaj tiv thaiv enzyme tshwj xeeb lossis cov tshuaj tiv thaiv kab mob. Stepper motors tso cai rau kev tswj qhov kub thiab txias los ntawm kev tswj xyuas qhov kev hloov pauv ntawm cov cua sov lossis qhov txias txias hauv kev sib cuag nrog cov qauv.
Automated calibration: Yuav kom ntseeg tau qhov tseeb ntawm cov txiaj ntsig kev ntsuas, kev kuaj ntshav yuav tsum tau ntsuas tsis tu ncua. Lub tshuab hluav taws xob uas tau tsav los ntawm stepper motors tau yooj yim txav lub calibrant los simulate cov xwm txheej ntawm qhov kev sim tiag tiag, yog li txhim kho qhov ua tau zoo thiab qhov tseeb ntawm cov txheej txheem calibration.

Mechanical positioning: Thaum ua cov ntshav ntsuam xyuas, nws yog ib qho tsim nyog yuav tsum xyuas kom meej tias ntau yam khoom siv kho tshuab (xws li lub koob yees duab microscope, laser emitters, thiab lwm yam) yog qhov tseeb raws li lub hom phiaj txoj hauj lwm. Stepper motors tuaj yeem ua tiav cov kev xav tau ntawm qhov chaw siab tshaj plaws los ntawm kev tswj xyuas qhov txav ntawm cov khoom.
Tsis tas li ntawd, daim ntawv thov ntawm8 hli micro-slider stepper motorshauv cov cuab yeej kuaj ntshav kuj tseem cuam tshuam txog kev txo cov nqi ntsuas, txhim kho kev ntsuas kev ua haujlwm, thiab txo qhov ntsuas qhov ntsuas. Piv txwv li, los ntawm kev siv stepper motors, modular tsim ntawm lub twj paj nruag tuaj yeem ua tiav, uas yooj yim rau kev saib xyuas thiab kho dua tshiab ntawm cov cuab yeej; Nyob rau tib lub sijhawm, vim muaj kev tswj xyuas meej muaj peev xwm ntawm stepper motors, qhov kev thov rau high-precision kis tau tus mob qhov chaw yuav raug txo, yog li txo tus nqi ntawm cov twj paj nruag.
Lub 8 hli me me slider stepper lub cev muaj zog ua lub luag haujlwm tseem ceeb hauv kev ntsuas ntshav. Nws txoj haujlwm ua haujlwm yog ua raws li txoj cai ntawm electromagnetic induction thiab kev sib cuam tshuam ntawm cov hlau nplaum ntawm qhov tam sim no, thiab nws ua tiav kev tswj hwm ntawm cov neeg kho tshuab los ntawm kev hloov kev sib hloov mus rau hauv cov lus tsa suab. Nyob rau hauv daim ntawv thov ntawm cov ntshav tester, stepper lub cev muaj zog yog tsuas yog siv los tsav lub precision mechanical system kom tiav cov qauv ua, reagent ntxiv, tswj kub, automated calibration thiab mechanical positioning thiab lwm yam dej num, uas pab txhim kho kev tshawb nrhiav efficiency thiab raug. Nyob rau tib lub sijhawm, kev siv cov stepper motors kuj txo cov nqi ntawm cov cuab yeej thiab txhawb kev muaj koob npe thiab kev loj hlob ntawm cov cuab yeej kuaj ntshav.
Post lub sij hawm: Jan-18-2024